
![]()
นอกจากอีมูเลเตอร์ Android Automotive OS Pixel Tablet แล้ว คุณยังใช้เป็นอุปกรณ์ฮาร์ดแวร์จริงเพื่อทดสอบ แอปใน Android Automotive OS ได้ด้วย
ขอสิทธิ์เข้าถึง
การเข้าถึงอิมเมจระบบ Android Automotive OS ใน Pixel Tablet ต้องได้รับการเพิ่มลงในรายการที่อนุญาต คุณสามารถส่งแบบฟอร์มขอสิทธิ์เข้าถึง Android Automotive OS ใน Pixel Tablet เพื่อขอสิทธิ์เข้าถึงได้
อิมเมจระบบ
เป้าหมายต่อไปนี้มีบิลด์พร้อมให้ใช้งานในสาขา git_udc-car-release
| เป้าหมาย | รูท adb |
บริการ Google Play | Google Automotive App Host | Google Play Store | Google Maps | Google Assistant | Android Auto |
|---|---|---|---|---|---|---|---|
tangorpro_car_ext-user |
✔ | ✔ | ✔ | ✔ | ✔ | ✔ | |
tangorpro_car_ext-userdebug |
✔ | ✔ | ✔ |
เป้าหมายต่อไปนี้มีบิลด์พร้อมให้ใช้งานในสาขา git_internal-android15-automotiveos-release
| เป้าหมาย | รูท adb |
บริการ Google Play | Google Automotive App Host | Google Play Store | Google Maps | Gemini | Android Auto |
|---|---|---|---|---|---|---|---|
tangorpro_car_ext-user |
✔ | ✔ | ✔ | ✔ | ✔ | ✔ | |
tangorpro_car_ext-userdebug |
✔ |
แฟลชอุปกรณ์
หากต้องการแฟลชอุปกรณ์ ให้ทำตามขั้นตอนที่ระบุไว้ในรายละเอียดในหัวข้อแฟลชด้วย Android Flash Tool ตรวจสอบว่าคุณได้ลงชื่อเข้าใช้เครื่องมือโดยใช้บัญชี Google ที่ลงทะเบียนเข้าร่วมโปรแกรมแล้ว มิเช่นนั้นคุณจะไม่เห็นบิลด์ เมื่อระบบขอให้เลือกบิลด์ ให้เลือกบิลด์จาก อิมเมจระบบ ที่ตรงกับความต้องการของคุณ
กลับไปใช้บิลด์สาธารณะ
หากต้องการเปลี่ยนกลับไปใช้ซอฟต์แวร์ของอุปกรณ์เวอร์ชันก่อนหน้า ให้ทำตาม วิธีการในหัวข้อเปลี่ยนกลับไปใช้บิลด์สาธารณะของ Pixel
ใช้อุปกรณ์เป็นตัวรับ Android Auto
ในอิมเมจ user (UAA1.250513.001 ขึ้นไป) คุณสามารถใช้อุปกรณ์เป็นตัวรับ Android Auto ได้ หากต้องการเชื่อมต่อโทรศัพท์กับ Pixel Tablet ที่ใช้ Android Automotive OS ให้เปิดแอป Android Auto จากกริดตัวเรียกใช้ในแท็บเล็ต แล้วทำตามวิธีการบนหน้าจอเพื่อจับคู่โดยใช้บลูทูธ
จำลองสถานะฮาร์ดแวร์
เช่นเดียวกับอีมูเลเตอร์ Android Automotive OS อิมเมจ Android Automotive OS สำหรับ Pixel Tablet รองรับการจำลองสถานะฮาร์ดแวร์
ที่มีสิทธิ์เข้าถึงรูทadb.
จำลองการขับรถ
จำลองการขับรถโดยใช้การตั้งค่าด่วน
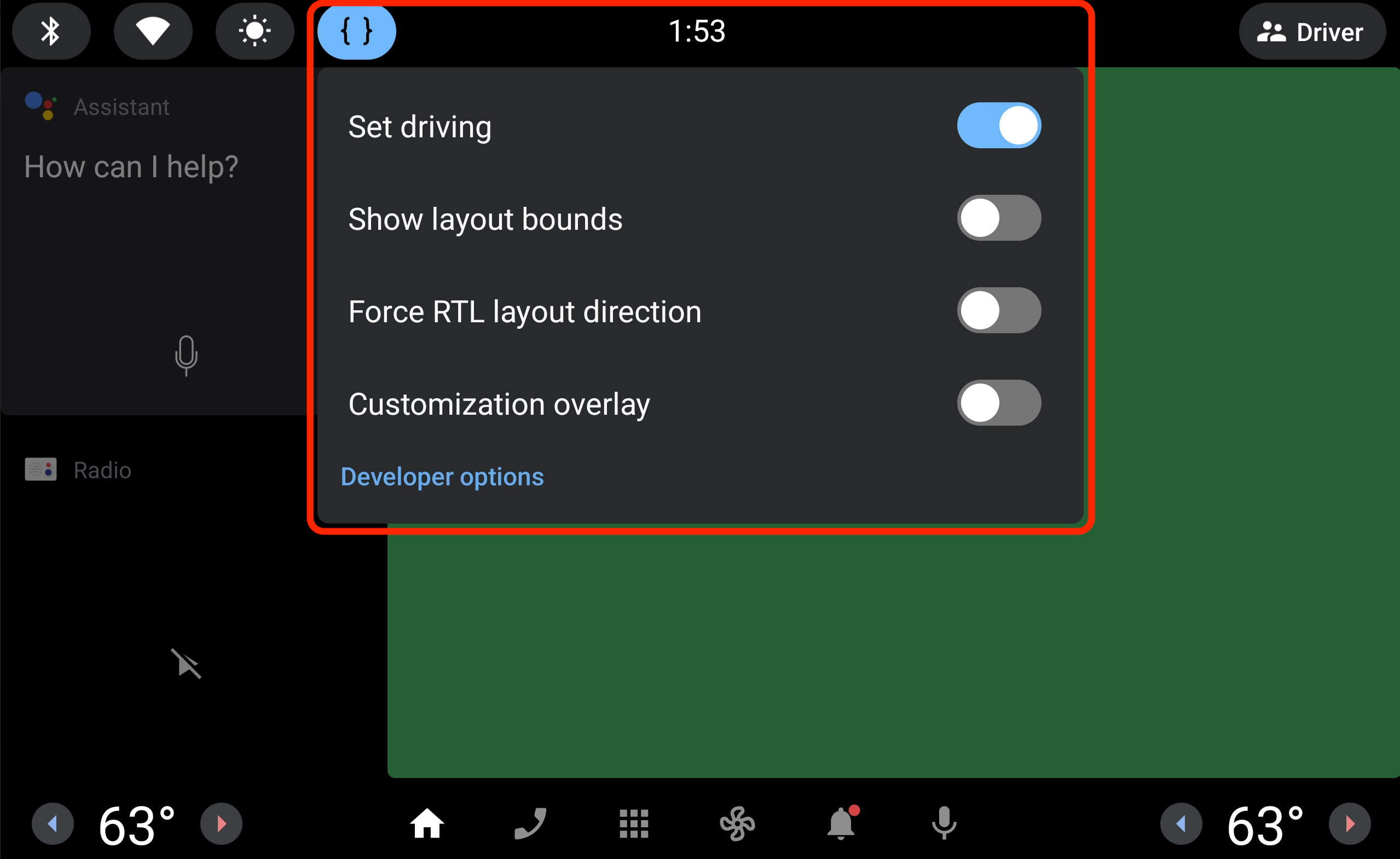
ในอิมเมจ userdebug (UAA1.250207.001 ขึ้นไป) คุณสามารถจำลองการขับรถได้โดยใช้เมนูการตั้งค่าด่วน ดังนี้
- เปิดใช้ตัวเลือกสำหรับนักพัฒนาซอฟต์แวร์
- ในเมนูการตั้งค่าด่วน ให้สลับตั้งค่าโหมดขับรถ ดังที่แสดงใน รูปภาพต่อไปนี้
จำลองการขับรถโดยใช้ adb
หากต้องการจำลองสถานะการขับรถโดยใช้ adb คุณสามารถใช้คำสั่งต่อไปนี้
adb shell cmd car_service inject-vhal-event 0x11600207 30 -t 2000 \
&& adb shell cmd car_service inject-vhal-event 0x11400400 8 \
&& adb shell cmd car_service inject-vhal-event 0x11200402 falseคำสั่งนี้จะทำ 3 สิ่งต่อไปนี้
- ตั้งค่า
PREF_VEHICLE_SPEEDเป็น 30 เมตรต่อวินาที (ประมาณ 67 ไมล์ต่อชั่วโมงหรือ 108 กม./ชม.) โดยเพิ่มความเร็วขึ้นภายใน 2 วินาที - ตั้งค่า
GEAR_SELECTIONเป็นGEAR_DRIVE - ตั้งค่า
PARKING_BRAKE_ONเป็นfalse
หากต้องการจำลองสถานะจอดรถ (สถานะเริ่มต้นเมื่อบูต) คุณสามารถใช้คำสั่งต่อไปนี้
adb shell dumpsys car_service inject-vhal-event 0x11600207 0 \
&& adb shell dumpsys car_service inject-vhal-event 0x11400400 4คำสั่งนี้จะทำ 2 สิ่งต่อไปนี้
- ตั้งค่า
PREF_VEHICLE_SPEEDเป็น 0 เมตรต่อวินาที (หยุด) - ตั้งค่า
GEAR_SELECTIONเป็นGEAR_PARK
ปัญหาที่ทราบแล้ว
Android Automotive OS สำหรับ Pixel Tablet ไม่ได้รับการรับรอง CTS และไม่ควรใช้เป็นอุปกรณ์ที่พร้อมใช้งานจริง ส่วนนี้จะอธิบายปัญหาที่ทราบและวิธีแก้ปัญหาที่อาจเกิดขึ้น
หากพบปัญหาหรือมีคำขอฟีเจอร์ขณะใช้ Android Automotive OS ใน Pixel Tablet คุณสามารถรายงานปัญหาดังกล่าวได้โดยใช้เครื่องมือติดตามปัญหาของ Google อย่าลืมกรอกข้อมูลทั้งหมดที่ระบบขอในเทมเพลตปัญหา ก่อน ยื่นเรื่องปัญหาใหม่ โปรดตรวจสอบว่ามีการรายงานปัญหาดังกล่าวในรายการปัญหา แล้วหรือยัง คุณสามารถติดตามและโหวตปัญหาได้โดยคลิกดาวสำหรับปัญหาในเครื่องมือติดตาม ดูข้อมูลเพิ่มเติมได้ที่ การติดตามปัญหา
ตำแหน่ง
เนื่องจาก Pixel Tablet ไม่มีเซ็นเซอร์ GPS และอุปกรณ์ Android Automotive OS ไม่จำเป็นต้องรองรับตำแหน่งเครือข่าย Pixel Tablet ที่ใช้ Android Automotive OS จึงไม่รายงานตำแหน่งของตัวเอง
จำลองสถานที่โดยใช้แอป
หากต้องการทดสอบแอปที่ต้องใช้การอ่านตำแหน่ง ให้เปิดใช้ตัวเลือกสำหรับนักพัฒนาซอฟต์แวร์ และติดตั้งแอปจำลองสถานที่
จำลองสถานที่โดยใช้ adb
หรือคุณจะใช้ adb เพื่อจำลองสถานที่โดยใช้คำสั่งต่อไปนี้ก็ได้
# Turn on the system location setting
adb shell cmd location set-location-enabled true
# Enable the developer option to allow mock locations
adb shell appops set 2000 android:mock_location allow
# Add a mock location provider named PROVIDER_NAME
# If your app uses a specific type of location provider, you should use the standard
# name of that provider, such as "fused", "gps", "network", or "passive"
adb shell cmd location providers add-test-provider PROVIDER_NAME
# Use the mock location provider named PROVIDER_NAME
adb shell cmd location providers set-test-provider-enabled PROVIDER_NAME true
# Set the location provided by PROVIDER_NAME,
# where latitude and longitude are a comma separated pair such as "37.4215,-122.0843"
adb shell cmd location providers set-test-provider-location PROVIDER_NAME --location LATITUDE,LONGITUDE
# Confirm that the location has been set
adb shell dumpsys location | grep "last location"
หากต้องการหยุดใช้ผู้ให้บริการจำลองสถานที่ ให้ใช้คำสั่งต่อไปนี้
adb shell cmd location providers set-test-provider-enabled PROVIDER_NAME false
บลูทูธ
การรองรับโปรไฟล์บลูทูธ เช่น โปรไฟล์แฮนด์ฟรี (HFP) และโปรไฟล์การกระจายเสียงขั้นสูง (A2DP) อาจขาดหายไปหรือ ทำงานไม่เต็มที่
วิทยุ
แอปวิทยุเริ่มต้นไม่ทำงาน
Android Auto
การเชื่อมต่อ Android Auto แบบใช้สายทำงานไม่สอดคล้องกัน ให้ใช้การเชื่อมต่อแบบไร้สายหากทำได้ ดูวิธีการทีละขั้นตอนได้ที่ตั้งค่า Android Auto
บันทึกประจำรุ่น
AAI5.260516.001.A2 (16 พฤษภาคม 2026)
รุ่นนี้มีบิลด์พร้อมให้ใช้งานในสาขา git_internal-android15-automotiveos-release
อัปเดต
- อิมเมจ Android 15 ชุดแรกสำหรับเป้าหมาย
tangorpro_car_ext-userและtangorpro_car_ext-userdebug - บิลด์
tangorpro_car_ext-userเพิ่มการรองรับแอปสื่อที่สร้างขึ้นโดยใช้ เทมเพลตไลบรารีแอปสำหรับรถยนต์ - บิลด์
tangorpro_car_ext-userเพิ่มการรองรับ Gemini
UAA1.250513.001 (13 พฤษภาคม 2025)
รุ่นนี้มีบิลด์พร้อมให้ใช้งานในสาขา git_udc-car-release
อัปเดต
- บิลด์
tangorpro_car_ext-userรองรับการทำหน้าที่เป็นตัวรับ Android Auto แล้ว
UAA1.250207.001 (7 กุมภาพันธ์ 2025)
รุ่นนี้มีบิลด์พร้อมให้ใช้งานในสาขา git_udc-car-release
อัปเดต
- เพิ่มการรองรับแอปบนมือถือที่พร้อมใช้งานกับรถยนต์
- ปรับปรุงความเสถียรของเสียงสำหรับการควบคุมระดับเสียง
- ปิดใช้การปลุกจากการถอดสาย USB และการแตะเพื่อลดการใช้แบตเตอรี่
- เปิดใช้บริการกล้อง
- รองรับเมนูการตั้งค่าด่วน ในแถบสถานะสำหรับนักพัฒนาซอฟต์แวร์ (ใช้ได้เฉพาะในบิลด์ userdebug)
แก้ไขข้อบกพร่อง
- เปลี่ยนระดับเสียงของเสียงตามสตรีม
- ระดับเสียงเพลงจะคงอยู่ และการควบคุมระดับเสียงจะไม่ปรากฏขึ้นเมื่อบูต
- ไม่มีการขัดข้องอีกต่อไปเมื่อเปลี่ยนระดับเสียงในการตั้งค่า
- Wi-Fi ถูกปิดใช้หลังจากการรีบูต
- สลับระหว่าง Rotary IME กับ Carboard โดยอัตโนมัติ
- นำฟีเจอร์ที่ไม่พร้อมใช้งานออก เช่น
android.software.app_widgets