
La plataforma de Android proporciona varios sensores que te permiten supervisar el movimiento de un dispositivo.
Las posibles arquitecturas de los sensores varían según el tipo de sensor:
- Los sensores de gravedad, aceleración lineal, vector de rotación, movimiento significativo, contador de pasos y detector de pasos pueden ser basados en hardware o en software.
- Los sensores de acelerómetro y giroscopio siempre se basan en hardware.
La mayoría de los dispositivos Android tienen un acelerómetro y muchos ahora incluyen un giroscopio. La disponibilidad de los sensores basados en software es más variable porque, a menudo, dependen de uno o más sensores de hardware para derivar sus datos. Según el dispositivo, estos sensores basados en software pueden derivar sus datos del acelerómetro y el magnetómetro, o bien del giroscopio.
Los sensores de movimiento son útiles para supervisar el movimiento del dispositivo, como la inclinación, la agitación, la rotación o el balanceo. Por lo general, el movimiento es un reflejo de la entrada directa del usuario (por ejemplo, un usuario que conduce un automóvil en un juego o que controla una pelota en un juego), pero también puede ser un reflejo del entorno físico en el que se encuentra el dispositivo (por ejemplo, moverse contigo mientras conduces tu automóvil). En el primer caso, supervisas el movimiento en relación con el marco de referencia del dispositivo o el de tu aplicación; en el segundo, supervisas el movimiento en relación con el marco de referencia del mundo. Los sensores de movimiento por sí solos no se suelen usar para supervisar la posición del dispositivo, pero se pueden usar con otros sensores, como el sensor de campo geomagnético, para determinar la posición de un dispositivo en relación con el marco de referencia del mundo (consulta Sensores de posición para obtener más información).
Todos los sensores de movimiento devuelven arreglos multidimensionales de valores de sensor para cada SensorEvent. Por ejemplo, durante un solo evento del sensor, el acelerómetro devuelve datos de la fuerza de aceleración para los tres ejes de coordenadas, y el giroscopio devuelve datos de la velocidad de rotación para los tres ejes de coordenadas. Estos valores de datos se muestran en un array float (values) junto con otros parámetros SensorEvent. En la tabla 1, se resumen los sensores de movimiento que están disponibles en la plataforma de Android.
Tabla 1: Sensores de movimiento compatibles con la plataforma de Android.
| Sensor | Datos del evento del sensor | Descripción | Unidades de medición |
|---|---|---|---|
TYPE_ACCELEROMETER |
SensorEvent.values[0] |
Fuerza de aceleración a lo largo del eje X (incluida la gravedad). | m/s2 |
SensorEvent.values[1] |
Fuerza de aceleración a lo largo del eje Y (incluida la gravedad). | ||
SensorEvent.values[2] |
Fuerza de aceleración a lo largo del eje Z (incluida la gravedad). | ||
TYPE_ACCELEROMETER_UNCALIBRATED |
SensorEvent.values[0] |
Aceleración medida a lo largo del eje X sin ninguna compensación de sesgo. | m/s2 |
SensorEvent.values[1] |
Aceleración medida a lo largo del eje Y sin ninguna compensación de sesgo. | ||
SensorEvent.values[2] |
Aceleración medida a lo largo del eje Z sin ninguna compensación de sesgo. | ||
SensorEvent.values[3] |
Aceleración medida a lo largo del eje X con compensación de sesgo estimada. | ||
SensorEvent.values[4] |
Aceleración medida a lo largo del eje Y con la compensación de sesgo estimada. | ||
SensorEvent.values[5] |
Aceleración medida a lo largo del eje Z con la compensación de sesgo estimada. | ||
TYPE_GRAVITY |
SensorEvent.values[0] |
Fuerza de gravedad a lo largo del eje X. | m/s2 |
SensorEvent.values[1] |
Fuerza de gravedad a lo largo del eje Y. | ||
SensorEvent.values[2] |
Fuerza de gravedad a lo largo del eje Z. | ||
TYPE_GYROSCOPE |
SensorEvent.values[0] |
Velocidad de rotación alrededor del eje X. | rad/s |
SensorEvent.values[1] |
Velocidad de rotación alrededor del eje Y. | ||
SensorEvent.values[2] |
Es la velocidad de rotación alrededor del eje Z. | ||
TYPE_GYROSCOPE_UNCALIBRATED |
SensorEvent.values[0] |
Velocidad de rotación (sin compensación de desviación) alrededor del eje X. | rad/s |
SensorEvent.values[1] |
Velocidad de rotación (sin compensación de deriva) alrededor del eje Y. | ||
SensorEvent.values[2] |
Velocidad de rotación (sin compensación de desviación) alrededor del eje Z. | ||
SensorEvent.values[3] |
Es la desviación estimada alrededor del eje X. | ||
SensorEvent.values[4] |
Es la desviación estimada alrededor del eje Y. | ||
SensorEvent.values[5] |
Es la desviación estimada alrededor del eje Z. | ||
TYPE_LINEAR_ACCELERATION |
SensorEvent.values[0] |
Fuerza de aceleración a lo largo del eje X (sin incluir la gravedad). | m/s2 |
SensorEvent.values[1] |
Fuerza de aceleración a lo largo del eje Y (sin incluir la gravedad). | ||
SensorEvent.values[2] |
Fuerza de aceleración a lo largo del eje Z (sin incluir la gravedad). | ||
TYPE_ROTATION_VECTOR |
SensorEvent.values[0] |
Componente del vector de rotación a lo largo del eje X (X * sen(θ/2)). | Sin unidades |
SensorEvent.values[1] |
Componente del vector de rotación a lo largo del eje Y (Y * sen(θ/2)). | ||
SensorEvent.values[2] |
Componente del vector de rotación a lo largo del eje Z (Z * sen(θ/2)). | ||
SensorEvent.values[3] |
Componente escalar del vector de rotación (cos(θ/2)).1 | ||
TYPE_SIGNIFICANT_MOTION |
N/A | N/A | N/A |
TYPE_STEP_COUNTER |
SensorEvent.values[0] |
Cantidad de pasos que dio el usuario desde el último reinicio mientras el sensor estaba activado. | Pasos |
TYPE_STEP_DETECTOR |
N/A | N/A | N/A |
1 El componente escalar es un valor opcional.
El sensor de vector de rotación y el sensor de gravedad son los sensores que se usan con mayor frecuencia para la detección y el monitoreo de movimiento. El sensor de vector de rotación es particularmente versátil y se puede usar para una amplia variedad de tareas relacionadas con el movimiento, como detectar gestos, supervisar el cambio angular y supervisar los cambios de orientación relativa. Por ejemplo, el sensor de vector de rotación es ideal si desarrollas un juego, una aplicación de realidad aumentada, una brújula bidimensional o tridimensional, o una app de estabilización de cámara. En la mayoría de los casos, usar estos sensores es una mejor opción que usar el acelerómetro y el sensor de campo geomagnético o el sensor de orientación.
Sensores del Proyecto de código abierto de Android
El Proyecto de código abierto de Android (AOSP) proporciona tres sensores de movimiento basados en software: un sensor de gravedad, un sensor de aceleración lineal y un sensor de vector de rotación. Estos sensores se actualizaron en Android 4.0 y ahora usan el giroscopio de un dispositivo (además de otros sensores) para mejorar la estabilidad y el rendimiento. Si quieres probar estos sensores, puedes identificarlos con los métodos getVendor() y getVersion() (el proveedor es Google LLC y el número de versión es 3). Es necesario identificar estos sensores por proveedor y número de versión, ya que el sistema Android considera que estos tres sensores son secundarios. Por ejemplo, si un fabricante de dispositivos proporciona su propio sensor de gravedad, el sensor de gravedad del AOSP aparecerá como un sensor de gravedad secundario. Estos tres sensores dependen de un giroscopio: si un dispositivo no tiene giroscopio, estos sensores no aparecen y no están disponibles para su uso.
Cómo usar el sensor de gravedad
El sensor de gravedad proporciona un vector tridimensional que indica la dirección y la magnitud de la gravedad. Por lo general, este sensor se usa para determinar la orientación relativa del dispositivo en el espacio. En el siguiente código, se muestra cómo obtener una instancia del sensor de gravedad predeterminado:
Kotlin
val sensorManager = getSystemService(Context.SENSOR_SERVICE) as SensorManager val sensor: Sensor? = sensorManager.getDefaultSensor(Sensor.TYPE_GRAVITY)
Java
private SensorManager sensorManager; private Sensor sensor; ... sensorManager = (SensorManager) getSystemService(Context.SENSOR_SERVICE); sensor = sensorManager.getDefaultSensor(Sensor.TYPE_GRAVITY);
Las unidades son las mismas que las que usa el sensor de aceleración (m/s2), y el sistema de coordenadas es el mismo que el que usa el sensor de aceleración.
Nota: Cuando un dispositivo está en reposo, el resultado del sensor de gravedad debe ser idéntico al del acelerómetro.
Cómo usar el acelerómetro lineal
El sensor de aceleración lineal te proporciona un vector tridimensional que representa la aceleración a lo largo de cada eje del dispositivo, sin incluir la gravedad. Puedes usar este valor para realizar la detección de gestos. El valor también puede servir como entrada para un sistema de navegación inercial, que usa la estimación a ciegas. En el siguiente código, se muestra cómo obtener una instancia del sensor de aceleración lineal predeterminado:
Kotlin
val sensorManager = getSystemService(Context.SENSOR_SERVICE) as SensorManager val sensor: Sensor? = sensorManager.getDefaultSensor(Sensor.TYPE_LINEAR_ACCELERATION)
Java
private SensorManager sensorManager; private Sensor sensor; ... sensorManager = (SensorManager) getSystemService(Context.SENSOR_SERVICE); sensor = sensorManager.getDefaultSensor(Sensor.TYPE_LINEAR_ACCELERATION);
Conceptualmente, este sensor te proporciona datos de aceleración según la siguiente relación:
linear acceleration = acceleration - acceleration due to gravity
Por lo general, se usa este sensor cuando se desean obtener datos de aceleración sin la influencia de la gravedad. Por ejemplo, podrías usar este sensor para ver qué tan rápido va tu automóvil. El sensor de aceleración lineal siempre tiene una compensación que debes quitar. La forma más simple de hacerlo es incorporar un paso de calibración en tu aplicación. Durante la calibración, puedes pedirle al usuario que coloque el dispositivo sobre una mesa y, luego, leer los desplazamientos para los tres ejes. Luego, puedes restar ese desplazamiento de las lecturas directas del sensor de aceleración para obtener la aceleración lineal real.
El sistema de coordenadas del sensor es el mismo que el que usa el sensor de aceleración, al igual que las unidades de medida (m/s2).
Cómo usar el sensor de vector de rotación
El vector de rotación representa la orientación del dispositivo como una combinación de un ángulo y un eje, en la que el dispositivo rotó un ángulo θ alrededor de un eje (x, y o z). En el siguiente código, se muestra cómo obtener una instancia del sensor de vector de rotación predeterminado:
Kotlin
val sensorManager = getSystemService(Context.SENSOR_SERVICE) as SensorManager val sensor: Sensor? = sensorManager.getDefaultSensor(Sensor.TYPE_ROTATION_VECTOR)
Java
private SensorManager sensorManager; private Sensor sensor; ... sensorManager = (SensorManager) getSystemService(Context.SENSOR_SERVICE); sensor = sensorManager.getDefaultSensor(Sensor.TYPE_ROTATION_VECTOR);
Los tres elementos del vector de rotación se expresan de la siguiente manera:
Aquí, la magnitud del vector de rotación es igual a sen(θ/2), y la dirección del vector de rotación es igual a la dirección del eje de rotación.
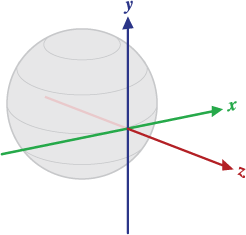
Figura 1: Es el sistema de coordenadas que usa el sensor de vector de rotación.
Los tres elementos del vector de rotación son iguales a los últimos tres componentes de un cuaternión unitario (cos(θ/2), x*sin(θ/2), y*sin(θ/2), z*sin(θ/2)). Los elementos del vector de rotación no tienen unidades. Los ejes X, Y y Z se definen de la misma manera que el sensor de aceleración. El sistema de coordenadas de referencia se define como una base ortonormal directa (consulta la figura 1). Este sistema de coordenadas tiene las siguientes características:
- X se define como el producto vectorial Y × Z. Es tangente al suelo en la ubicación actual del dispositivo y apunta aproximadamente hacia el este.
- Y es tangente al suelo en la ubicación actual del dispositivo y apunta hacia el polo norte geomagnético.
- El eje Z apunta hacia el cielo y es perpendicular al plano del suelo.
Para ver una aplicación de ejemplo que muestra cómo usar el sensor del vector de rotación, consulta RotationVectorDemo.java.
Cómo usar el sensor de movimiento significativo
El sensor de movimiento significativo activa un evento cada vez que se detecta movimiento significativo y, luego, se inhabilita. Un movimiento significativo es aquel que podría provocar un cambio en la ubicación del usuario, por ejemplo, caminar, andar en bicicleta o sentarse en un automóvil en movimiento. En el siguiente código, se muestra cómo obtener una instancia del sensor de movimiento significativo predeterminado y cómo registrar un objeto de escucha de eventos:
Kotlin
val sensorManager = getSystemService(Context.SENSOR_SERVICE) as SensorManager val mSensor: Sensor? = sensorManager.getDefaultSensor(Sensor.TYPE_SIGNIFICANT_MOTION) val triggerEventListener = object : TriggerEventListener() { override fun onTrigger(event: TriggerEvent?) { // Do work } } mSensor?.also { sensor -> sensorManager.requestTriggerSensor(triggerEventListener, sensor) }
Java
private SensorManager sensorManager; private Sensor sensor; private TriggerEventListener triggerEventListener; ... sensorManager = (SensorManager) getSystemService(Context.SENSOR_SERVICE); sensor = sensorManager.getDefaultSensor(Sensor.TYPE_SIGNIFICANT_MOTION); triggerEventListener = new TriggerEventListener() { @Override public void onTrigger(TriggerEvent event) { // Do work } }; sensorManager.requestTriggerSensor(triggerEventListener, mSensor);
Para obtener más detalles, consulta la información de TriggerEventListener.
Cómo usar el sensor de contador de pasos
El sensor de contador de pasos proporciona la cantidad de pasos que dio el usuario desde el último reinicio mientras el sensor estuvo activado. El contador de pasos tiene más latencia (hasta 10 segundos), pero más precisión que el sensor del detector de pasos.
Nota: Debes declarar el permiso ACTIVITY_RECOGNITION para que tu app pueda usar este sensor en dispositivos que ejecuten Android 10 (nivel de API 29) o versiones posteriores.
En el siguiente código, se muestra cómo obtener una instancia del sensor de contador de pasos predeterminado:
Kotlin
val sensorManager = getSystemService(Context.SENSOR_SERVICE) as SensorManager val sensor: Sensor? = sensorManager.getDefaultSensor(Sensor.TYPE_STEP_COUNTER)
Java
private SensorManager sensorManager; private Sensor sensor; ... sensorManager = (SensorManager) getSystemService(Context.SENSOR_SERVICE); sensor = sensorManager.getDefaultSensor(Sensor.TYPE_STEP_COUNTER);
Para preservar la batería en los dispositivos que ejecutan tu app, debes usar la clase JobScheduler para recuperar el valor actual del sensor de contador de pasos en un intervalo específico. Si bien los diferentes tipos de apps requieren diferentes intervalos de lectura de sensores, debes hacer que este intervalo sea lo más largo posible, a menos que tu app requiera datos en tiempo real del sensor.
Cómo usar el sensor de detector de pasos
El sensor de detector de pasos activa un evento cada vez que el usuario da un paso. Se espera que la latencia sea inferior a 2 segundos.
Nota: Debes declarar el permiso ACTIVITY_RECOGNITION para que tu app pueda usar este sensor en dispositivos que ejecuten Android 10 (nivel de API 29) o versiones posteriores.
En el siguiente código, se muestra cómo obtener una instancia del sensor predeterminado del detector de pasos:
Kotlin
val sensorManager = getSystemService(Context.SENSOR_SERVICE) as SensorManager val sensor: Sensor? = sensorManager.getDefaultSensor(Sensor.TYPE_STEP_DETECTOR)
Java
private SensorManager sensorManager; private Sensor sensor; ... sensorManager = (SensorManager) getSystemService(Context.SENSOR_SERVICE); sensor = sensorManager.getDefaultSensor(Sensor.TYPE_STEP_DETECTOR);
Trabaja con datos sin procesar
Los siguientes sensores proporcionan a tu app datos sin procesar sobre las fuerzas lineales y rotativas que se aplican al dispositivo. Para usar los valores de estos sensores de manera eficaz, debes filtrar los factores del entorno, como la gravedad. También es posible que debas aplicar un algoritmo de suavizado a la tendencia de los valores para reducir el ruido.
Cómo usar el acelerómetro
Un sensor de aceleración mide la aceleración que se aplica al dispositivo, incluida la fuerza de gravedad. En el siguiente código, se muestra cómo obtener una instancia del sensor de aceleración predeterminado:
Kotlin
val sensorManager = getSystemService(Context.SENSOR_SERVICE) as SensorManager val sensor: Sensor? = sensorManager.getDefaultSensor(Sensor.TYPE_ACCELEROMETER)
Java
private SensorManager sensorManager; private Sensor sensor; ... sensorManager = (SensorManager) getSystemService(Context.SENSOR_SERVICE); sensor = sensorManager.getDefaultSensor(Sensor.TYPE_ACCELEROMETER);
Nota: Si tu app se segmenta para Android 12 (nivel de API 31) o versiones posteriores, este sensor tiene limitaciones de frecuencia.
Conceptualmente, un sensor de aceleración determina la aceleración que se aplica a un dispositivo (Ad) midiendo las fuerzas que se aplican al sensor (Fs) con la siguiente relación:
Sin embargo, la fuerza de gravedad siempre influye en la aceleración medida según la siguiente relación:

Por este motivo, cuando el dispositivo está sobre una mesa (y no se acelera), el acelerómetro indica una magnitud de g = 9.81 m/s2. Del mismo modo, cuando el dispositivo está en caída libre y, por lo tanto, se acelera rápidamente hacia el suelo a 9.81 m/s2, su acelerómetro registra una magnitud de g = 0 m/s2. Por lo tanto, para medir la aceleración real del dispositivo, se debe quitar la contribución de la fuerza de gravedad de los datos del acelerómetro. Esto se puede lograr aplicando un filtro de paso alto. Por el contrario, se puede usar un filtro de paso bajo para aislar la fuerza de gravedad. En el siguiente ejemplo, se muestra cómo hacerlo:
Kotlin
override fun onSensorChanged(event: SensorEvent) { // In this example, alpha is calculated as t / (t + dT), // where t is the low-pass filter's time-constant and // dT is the event delivery rate. val alpha: Float = 0.8f // Isolate the force of gravity with the low-pass filter. gravity[0] = alpha * gravity[0] + (1 - alpha) * event.values[0] gravity[1] = alpha * gravity[1] + (1 - alpha) * event.values[1] gravity[2] = alpha * gravity[2] + (1 - alpha) * event.values[2] // Remove the gravity contribution with the high-pass filter. linear_acceleration[0] = event.values[0] - gravity[0] linear_acceleration[1] = event.values[1] - gravity[1] linear_acceleration[2] = event.values[2] - gravity[2] }
Java
public void onSensorChanged(SensorEvent event){ // In this example, alpha is calculated as t / (t + dT), // where t is the low-pass filter's time-constant and // dT is the event delivery rate. final float alpha = 0.8; // Isolate the force of gravity with the low-pass filter. gravity[0] = alpha * gravity[0] + (1 - alpha) * event.values[0]; gravity[1] = alpha * gravity[1] + (1 - alpha) * event.values[1]; gravity[2] = alpha * gravity[2] + (1 - alpha) * event.values[2]; // Remove the gravity contribution with the high-pass filter. linear_acceleration[0] = event.values[0] - gravity[0]; linear_acceleration[1] = event.values[1] - gravity[1]; linear_acceleration[2] = event.values[2] - gravity[2]; }
Nota: Puedes usar muchas técnicas diferentes para filtrar los datos del sensor. En la muestra de código anterior, se usa una constante de filtro simple (alfa) para crear un filtro de paso bajo. Esta constante de filtro se deriva de una constante de tiempo (t), que es una representación aproximada de la latencia que el filtro agrega a los eventos del sensor, y la tasa de entrega de eventos del sensor (dt). La muestra de código usa un valor alfa de 0.8 para fines de demostración. Si usas este método de filtrado, es posible que debas elegir un valor alfa diferente.
Los acelerómetros usan el sistema de coordenadas estándar del sensor. En la práctica, esto significa que se aplican las siguientes condiciones cuando un dispositivo está apoyado sobre una mesa en su orientación natural:
- Si empujas el dispositivo por el lado izquierdo (para que se mueva hacia la derecha), el valor de aceleración en X será positivo.
- Si empujas el dispositivo hacia abajo (para que se aleje de ti), el valor de aceleración en Y es positivo.
- Si empujas el dispositivo hacia el cielo con una aceleración de A m/s2, el valor de aceleración en Z es igual a A + 9.81, lo que corresponde a la aceleración del dispositivo (+A m/s2) menos la fuerza de gravedad (-9.81 m/s2).
- El dispositivo estacionario tendrá un valor de aceleración de +9.81, que corresponde a la aceleración del dispositivo (0 m/s2 menos la fuerza de gravedad, que es -9.81 m/s2).
En general, el acelerómetro es un buen sensor para usar si supervisas el movimiento del dispositivo. Casi todos los teléfonos celulares y las tablets con Android tienen un acelerómetro, y este usa aproximadamente 10 veces menos energía que los otros sensores de movimiento. Un inconveniente es que es posible que debas implementar filtros de paso bajo y paso alto para eliminar las fuerzas gravitacionales y reducir el ruido.
Cómo usar el giroscopio
El giroscopio mide la velocidad de rotación en rad/s alrededor de los ejes X, Y y Z de un dispositivo. El siguiente código muestra cómo obtener una instancia del giroscopio predeterminado:
Kotlin
val sensorManager = getSystemService(Context.SENSOR_SERVICE) as SensorManager val sensor: Sensor? = sensorManager.getDefaultSensor(Sensor.TYPE_GYROSCOPE)
Java
private SensorManager sensorManager; private Sensor sensor; ... sensorManager = (SensorManager) getSystemService(Context.SENSOR_SERVICE); sensor = sensorManager.getDefaultSensor(Sensor.TYPE_GYROSCOPE);
Nota: Si tu app se segmenta para Android 12 (nivel de API 31) o versiones posteriores, este sensor tiene limitaciones de frecuencia.
El sistema de coordenadas del sensor es el mismo que el que se usa para el sensor de aceleración. La rotación es positiva en el sentido contrario a las manecillas del reloj, es decir, un observador que mira desde alguna ubicación positiva en el eje X, Y o Z a un dispositivo ubicado en el origen informaría una rotación positiva si el dispositivo parece girar en sentido contrario a las manecillas del reloj. Esta es la definición matemática estándar de rotación positiva y no es la misma que la definición de balanceo que usa el sensor de orientación.
Por lo general, la salida del giroscopio se integra con el tiempo para calcular una rotación que describe el cambio de ángulos durante el intervalo de tiempo. Por ejemplo:
Kotlin
// Create a constant to convert nanoseconds to seconds. private val NS2S = 1.0f / 1000000000.0f private val deltaRotationVector = FloatArray(4) { 0f } private var timestamp: Float = 0f override fun onSensorChanged(event: SensorEvent?) { // This timestep's delta rotation to be multiplied by the current rotation // after computing it from the gyro sample data. if (timestamp != 0f && event != null) { val dT = (event.timestamp - timestamp) * NS2S // Axis of the rotation sample, not normalized yet. var axisX: Float = event.values[0] var axisY: Float = event.values[1] var axisZ: Float = event.values[2] // Calculate the angular speed of the sample val omegaMagnitude: Float = sqrt(axisX * axisX + axisY * axisY + axisZ * axisZ) // Normalize the rotation vector if it's big enough to get the axis // (that is, EPSILON should represent your maximum allowable margin of error) if (omegaMagnitude > EPSILON) { axisX /= omegaMagnitude axisY /= omegaMagnitude axisZ /= omegaMagnitude } // Integrate around this axis with the angular speed by the timestep // in order to get a delta rotation from this sample over the timestep // We will convert this axis-angle representation of the delta rotation // into a quaternion before turning it into the rotation matrix. val thetaOverTwo: Float = omegaMagnitude * dT / 2.0f val sinThetaOverTwo: Float = sin(thetaOverTwo) val cosThetaOverTwo: Float = cos(thetaOverTwo) deltaRotationVector[0] = sinThetaOverTwo * axisX deltaRotationVector[1] = sinThetaOverTwo * axisY deltaRotationVector[2] = sinThetaOverTwo * axisZ deltaRotationVector[3] = cosThetaOverTwo } timestamp = event?.timestamp?.toFloat() ?: 0f val deltaRotationMatrix = FloatArray(9) { 0f } SensorManager.getRotationMatrixFromVector(deltaRotationMatrix, deltaRotationVector); // User code should concatenate the delta rotation we computed with the current rotation // in order to get the updated rotation. // rotationCurrent = rotationCurrent * deltaRotationMatrix; }
Java
// Create a constant to convert nanoseconds to seconds. private static final float NS2S = 1.0f / 1000000000.0f; private final float[] deltaRotationVector = new float[4](); private float timestamp; public void onSensorChanged(SensorEvent event) { // This timestep's delta rotation to be multiplied by the current rotation // after computing it from the gyro sample data. if (timestamp != 0) { final float dT = (event.timestamp - timestamp) * NS2S; // Axis of the rotation sample, not normalized yet. float axisX = event.values[0]; float axisY = event.values[1]; float axisZ = event.values[2]; // Calculate the angular speed of the sample float omegaMagnitude = sqrt(axisX*axisX + axisY*axisY + axisZ*axisZ); // Normalize the rotation vector if it's big enough to get the axis // (that is, EPSILON should represent your maximum allowable margin of error) if (omegaMagnitude > EPSILON) { axisX /= omegaMagnitude; axisY /= omegaMagnitude; axisZ /= omegaMagnitude; } // Integrate around this axis with the angular speed by the timestep // in order to get a delta rotation from this sample over the timestep // We will convert this axis-angle representation of the delta rotation // into a quaternion before turning it into the rotation matrix. float thetaOverTwo = omegaMagnitude * dT / 2.0f; float sinThetaOverTwo = sin(thetaOverTwo); float cosThetaOverTwo = cos(thetaOverTwo); deltaRotationVector[0] = sinThetaOverTwo * axisX; deltaRotationVector[1] = sinThetaOverTwo * axisY; deltaRotationVector[2] = sinThetaOverTwo * axisZ; deltaRotationVector[3] = cosThetaOverTwo; } timestamp = event.timestamp; float[] deltaRotationMatrix = new float[9]; SensorManager.getRotationMatrixFromVector(deltaRotationMatrix, deltaRotationVector); // User code should concatenate the delta rotation we computed with the current rotation // in order to get the updated rotation. // rotationCurrent = rotationCurrent * deltaRotationMatrix; }
Los giroscopios estándar proporcionan datos de rotación sin procesar, sin ningún tipo de filtrado ni corrección del ruido y la desviación (sesgo). En la práctica, el ruido y la deriva del giroscopio introducirán errores que deberán compensarse. Por lo general, se determina la desviación (sesgo) y el ruido supervisando otros sensores, como el sensor de gravedad o el acelerómetro.
Cómo usar el giroscopio sin calibrar
El giroscopio no calibrado es similar al giroscopio, excepto que no se aplica ninguna compensación de desviación del giroscopio a la velocidad de rotación. La calibración de fábrica y la compensación de temperatura aún se aplican a la velocidad de rotación. El giroscopio sin calibrar es útil para el procesamiento posterior y la combinación de datos de orientación. En general, gyroscope_event.values[0] estará cerca de uncalibrated_gyroscope_event.values[0] - uncalibrated_gyroscope_event.values[3].
Equivale a lo siguiente:
calibrated_x ~= uncalibrated_x - bias_estimate_x
Nota: Los sensores no calibrados proporcionan más resultados sin procesar y pueden incluir cierto sesgo, pero sus mediciones contienen menos saltos de las correcciones aplicadas a través de la calibración. Algunas aplicaciones pueden preferir estos resultados sin calibrar, ya que son más fluidos y confiables. Por ejemplo, si una aplicación intenta realizar su propia fusión de sensores, la introducción de calibraciones puede distorsionar los resultados.
Además de las tasas de rotación, el giroscopio sin calibrar también proporciona la desviación estimada alrededor de cada eje. El siguiente código muestra cómo obtener una instancia del giroscopio no calibrado predeterminado:
Kotlin
val sensorManager = getSystemService(Context.SENSOR_SERVICE) as SensorManager val sensor: Sensor? = sensorManager.getDefaultSensor(Sensor.TYPE_GYROSCOPE_UNCALIBRATED)
Java
private SensorManager sensorManager; private Sensor sensor; ... sensorManager = (SensorManager) getSystemService(Context.SENSOR_SERVICE); sensor = sensorManager.getDefaultSensor(Sensor.TYPE_GYROSCOPE_UNCALIBRATED);
Muestras de código adicionales
En el ejemplo de BatchStepSensor, se demuestra aún más el uso de las APIs que se abordan en esta página.